近期,浙江师范大学杭州自动化学院(杭州人工智能学院)刘洋教授团队在国际控制与优化领域顶级期刊 IEEE Transactions on Automatic Control 和 SIAM Journal on Control and Optimization 上陆续发表4篇高水平论文,系统阐述了团队在多智能体系统、分布式优化及非凸优化控制等方向上的创新研究成果,并已成功应用于无人机集群、人工智能与智慧农业等领域,为该领域的智能化发展提供重要理论支撑和关键技术方案。
在 IEEE Transactions on Automatic Control 发表的论文:
1."Multiobjective Distributed Optimization via a Predefined-Time Multiagent Approach"
2."Momentum-Based Multiagent Approaches to Distributed Nonconvex Optimization"
3."Two-Timescale Distributed Approach to Nash Equilibrium Seeking of Euler-Lagrange Systems in Multicluster Nonconvex Games"
从三个层面展开:首先,提出了基于动量机制的多智能体优化新范式,构建了动量型系统动力学模型,使算法在非凸约束条件下具备更快的收敛速度与更高的鲁棒性;其次,提出了预设时间优化机制,实现了在可控时间内收敛到最优解的多智能体分布式算法;最后,进一步发展出双时间尺度的多集群非凸博弈求解框架,实现了复杂非凸博弈中广义纳什均衡的分布式收敛。该系列研究以非凸性、分布式性、时间可控性与动态博弈性为核心特征,形成层层递进的理论体系,突破了传统优化算法在复杂耦合网络中收敛速度慢、全局性不足及计算负担重等瓶颈。
在SIAM Journal on Control and Optimization 发表的论文"Practical Prescribed-Time Distributed Nonconvex Optimization via a Time-Base Generator"提出两类新型多智能体系统及改进型时间基生成器模型,突破了以往算法依赖于强凸性的局限性,实现了非凸条件下系统的预定时间收敛性证明,并验证了系统在有限时间内能够以较低计算复杂度实现全局或局部最优收敛,进一步拓展了非凸优化控制的理论工具箱。
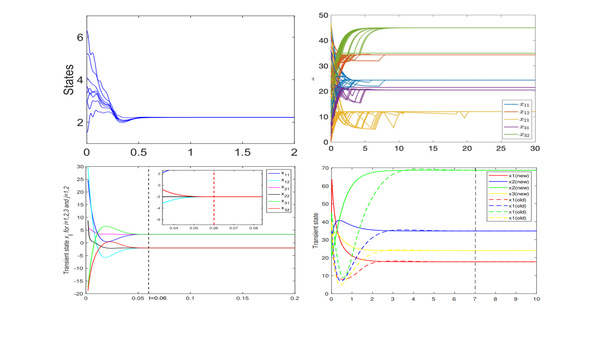
优化算法收敛曲线。图片来源 数学科学学院 杭州自动化学院
团队将核心算法与实际应用场景紧密结合,相关成果已成功应用于四旋翼无人机系统。通过构建预定义时间多目标轨迹规划算法与鲁棒预定义时间跟踪控制器,研究团队设计了“自主避障+协同编队飞行”的一体化无人系统框架。轨迹规划器能够在毫秒级时间内生成实时无碰撞轨迹,控制器则可在用户指定时间内确保系统具备稳定跟踪性能,并在有界扰动条件下仍保持良好鲁棒性。目前,该系统已在实验室及林下、农业基地等复杂场景中完成验证,实现了高难度任务的自主执行。

无人机在农业基地的“自主避障+数据采集”飞行任务。图片来源 数学科学学院 杭州自动化学院
团队依托浙江师范大学中国-莫桑比克智慧农业“一带一路”联合实验室,围绕低空无人机关键技术与工程应用,基于在分布式优化控制与多智能体协同算法方面的研究积累,融合高精度感知、实时路径规划、智能决策、低空通信与编队协同等核心技术,构建了面向复杂场景的无人机智能作业体系。该系统能够支持无人机在巡检、数据采集、低空物流投送及协同侦测等任务中实现高精度自主执行,并为农田、工业区与城域空域等多种场景,提供高频次、低成本、无人化的监测与作业服务。
上述研究成果均以浙江师范大学为第一完成单位,研究生夏子聪、黄邦华、林勤龙为论文第一作者,刘洋教授为通讯作者。其中,夏子聪与黄邦华的相关成果已入选中国自动化学会研究生论文工程。研究过程中,团队与浙江大学、东南大学、中南大学及澳门大学建立了深度合作关系,形成了跨学科、跨单位的协同攻关机制。此外,该系列研究获得了国家自然科学基金、浙江省自然科学基金杰出青年基金、浙江省“尖兵领雁”研发攻关计划及金华市重大科技专项的资助。
未来,团队将持续面向智能控制与分布式优化的国际前沿,深化非凸系统理论研究,推动无人机技术在智慧农业、低空工程、城市物流与智能制造等领域的自主化、智能化发展,为我国在控制与优化领域的理论创新与产业应用贡献更多力量。
编辑:武艳